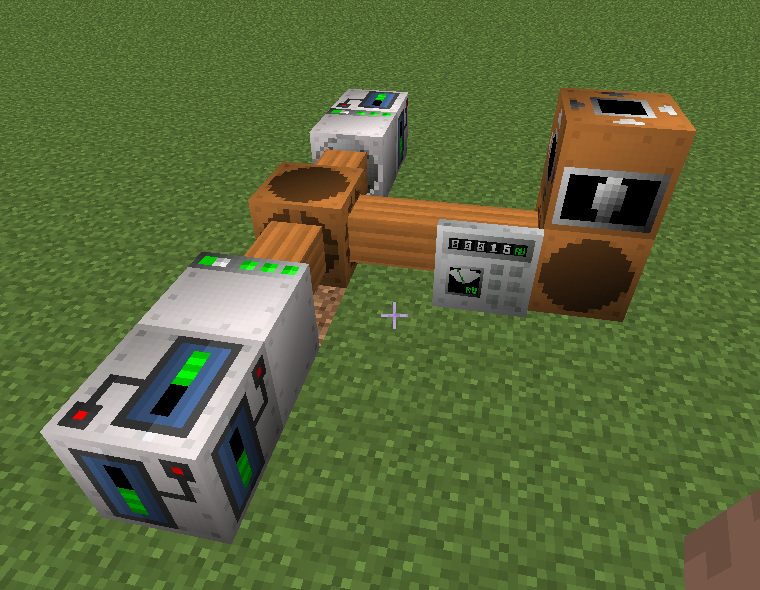
Theoretically, at the output of the system, the Tachometer should always show 32RU/t.When I turn off one Engine and then turn it on again, the total power drops, but does not always return to 32RU/t. When this happens, Axle connected to this Motor has an animation problem and a Centrifuge works slower than it should. The problem occurs only when I switch one specific Motor (one that is closer in screenshots).
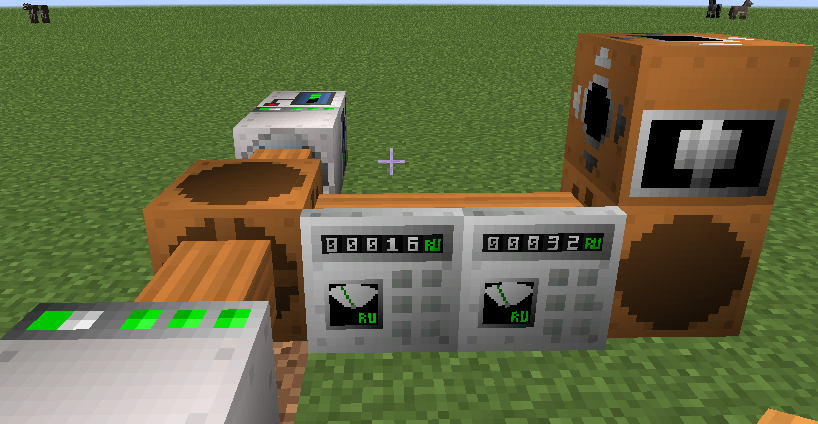
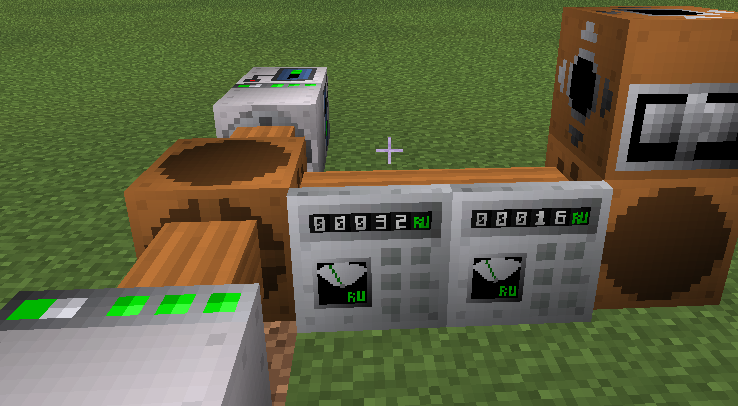
When this problem occurs, Tachometers installed on different segments of one Axle can show different values.
Although when I turn on the Motors simultaneously with the help of the Redstone, the problem does not appear. But I’m not sure that this will work in all situations.
And I have one unrelated question. When Transformer Gearbox works in reverse mode, its animation rotates in the direction opposite to Axles connected to it. Is it intentionally?
If you turn on both Motors at the exact same time, it WILL work 100% as long as both Axles are the same length.
Your problem is because the Gearbox between the 3 Axles will end up first taking power from ONE motor, it will try to EMIT power to the OTHER Motor instead of taking Power from it. The System behind it is really THAT crude, and outside of MC I am not gonna use this garbage ever again…
As for the Transformer Gearbox, I am not 100% sure if it is right or wrong, based on your text description of the Issue. Have you ever seen a Planetary Gearbox?
I connected four Motors following these rules and it seems to work well. If I understand correctly, all Axles between the Motors and the central Gearbox should be the same length. When I broke this rule by making the Axles connecting the pairs of Motors to the central Gearbox too long, the system could still reach full power after startup, but after reloading the map, one pair of Motors would lock up.
Is it possible to add the ability to manually assign where Gearbox will send power? Or add an alternate mode for Gearbox where it will wait until it receives power from all connected Axles except for one and then sends power to that Axle? That is, if three Axles are connected to the Gearbox, it waits until it receives power from any two.
This gif doesn’t look like what I see when I switch the Transformer Gearbox into reverse mode with Monkey Wrench and connect Axles to it. In game, it looks like the carrier and planetary gears are spinning in one direction, while the Axles are spinning in the other. Although this gif looks like a Transformer Gearbox and Axles animation in normal mode.
That is not how it works, your setup just coincides with the findings randomly, it is possible to make the setup you prescribed fuck up just like the other ones.
I have tried this scheme. During tests, it is able to go to full power even if the engines are not started at the same time, although I’m not sure that it will always work. It seems to depend on the tick order and depending on the direction, either start without problems or at the start, some engines can temporarily block and Power fluctuations can break Axles even if theoretically their strength is sufficient, so you have to use stronger Axles.
Buildings connecting multiple Motors do not always reach full power even if all Axles between the Motors and the central Gearbox are of the same length and the Motors are started at the same time by Redstone. Some buildings only work stably with Red Alloy Wires, although sometimes a map reload is needed. Some buildings work stably only with Redstone Dust. Is there a way to start Motors at the same time that will work stably in all situations?
It seems that if RU sources (Motors and Transformer Gearboxes) are connected directly to Custom Gearbox without Axles, then Gearbox does not try to send RU to RU sources even if those sources are turned off. Is it true? If so, this allows you to build a system that connects any number of Motors and is not sensitive to the start time of the Motors, although for four or more Motors you will need to use Transformer Gearboxes.
I presume it is in different Chunks then if it causes you Issues that way?
As for the Gearbox Motor thing, it is true BUT you forget that the Gearboxes THEMSELVES have the Issue, not the motors, so Motors to Gearboxes only helps partially.
I’m not sure that I understood the question correctly. Before building, I pressed F9 to highlight the borders of the Chunks. Buildings do not cross Chunk boundaries, and each Chunk contains only one building.
I know that it is the Custom Gearboxes themselves that have problems. I’m interested in a design where the Custom Gearbox is connected to one RU consumer (not another Custom Gearbox) either directly or via Axle and connected to 2 or 3 Motors directly. Can this design have problems if the Motors are not started at the same time?
I had a 8 bronze steam turbine power station in my basement, with a long axle upstairs (50 long?) and used gearboxes and axles to link and unlink machines as needed.
I had problems with the T layout, and inconsistent power upstairs.
I eventually got it working with 4x 64ru/t power packets stable, but it used to have problems where each server reboot I’d have to go wrench around the turbines until full power was restored.
I have a new layout with L’s using titanium engines and gear boxes, and no issues at all.
It turned out that a Universal Extender can be used to connect several Motors, even through Axles, as it can provide one-way connection. Although its principle of action differs from Custom Gearbox. It can simultaneously transmit RU packets of different sizes without loss and can take RU packets of different directions of rotation, although subtraction occurs, not addition.
Although it would be better if there was a cheaper and more specialized device that would have one output and several inputs, and each of the inputs would have an automatic clutch, like in the back wheel of a bicycle. Or at least a device with one input and one output that can be placed next to the Custom Gearbox to prevent it from sending RU in the wrong direction. Now you can use Transformer Gearbox for this, but it forcibly changes the size of RU packets, which is not always convenient.
The universal extender is special in that it just transfers EVERYTHING, which is why it needs to be so expensive in the first place, since it needs one of every component.